Kuulamylly on erilaisten kappaleiden jauhamiseen tarkoitettu pyörivä sylinteri, jossa jauhinkappaleina käytetään pyöreitä kuulia. Myllyn pyöriessä kuulat nousevat keskipakoisvoiman avulla sylinterin ulkokuorta pitkin ja painovoiman voittaessa putoavat jauhettavan materiaalin päälle. –Wikipedia
Selkeä homma, eikös? Tuommoinen jokatapauksessa kalustuksesta puuttui ja tuolle on vuosien mittaan tullut mietittyä porukassa jos toisessakin eri käyttötarkoituksia. Myllyä kun voi käyttää metallin valamisessa, eri materiaalien pintakäsittelyssä tai sitten sillä voi tehdä vaikkapa termiittiä jos sille päälle sattuu.

Mekaaninen puoli valmistui totuttuun tapaan tallin puolella, kulmaraudalla taisi olla kokoa 30x30x4. Näitä on nyt tullut harjoiteltua, joten ei muuta kuin palaset rälläkällä oikeaan mittaan, magneettikulma nurkkaan ja hitsisaumaa päälle.
 Kehikon hitsauksen jälkeen ensimmäiset koesovitukset akselille. Hitsaaminen onnistui tälläkertaa melkein suoraan, ristimitta jäi heittämään 2 milliä. Kovin kattavaa kuvamateriaalia ei tullut otettua, mutta printatun mustan suorakaiteen sisällä on rullaluistimen laakeri ja akselina toimii 8millinen vedetty rst, kun sellaista pari jämäpätkää tallin nurkasta löytyi. Kuvassa näkyy myös ensimmäinen revisio rullista, joiden päälle sylinteri on ajatus asettaa.
Kehikon hitsauksen jälkeen ensimmäiset koesovitukset akselille. Hitsaaminen onnistui tälläkertaa melkein suoraan, ristimitta jäi heittämään 2 milliä. Kovin kattavaa kuvamateriaalia ei tullut otettua, mutta printatun mustan suorakaiteen sisällä on rullaluistimen laakeri ja akselina toimii 8millinen vedetty rst, kun sellaista pari jämäpätkää tallin nurkasta löytyi. Kuvassa näkyy myös ensimmäinen revisio rullista, joiden päälle sylinteri on ajatus asettaa.
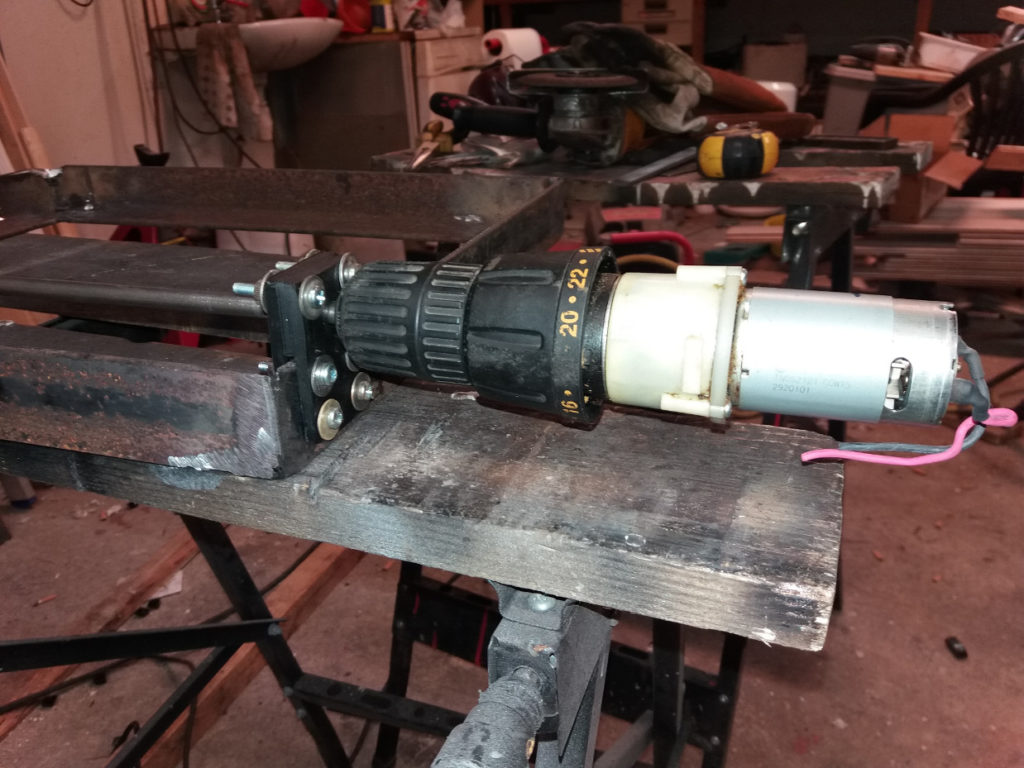 Moottorin luovutti vanha 12V akkuporakone, koko paketti vaihteistoineen ja istukoineen lähti nättinä pakettina irti. Moottorin kyljestä löytyi tarpeeksi numeroita, joiden perusteella selvisi että moottori nielaisee täydellä kuormalla 7.5A, joka on tähdellinen tieto ohjauselektroniikkaa sunniteltaessa.
Moottorin luovutti vanha 12V akkuporakone, koko paketti vaihteistoineen ja istukoineen lähti nättinä pakettina irti. Moottorin kyljestä löytyi tarpeeksi numeroita, joiden perusteella selvisi että moottori nielaisee täydellä kuormalla 7.5A, joka on tähdellinen tieto ohjauselektroniikkaa sunniteltaessa.
 Rautaosat saivat kevyen hionnan ja halvinta mattamustaa kilikolimaalia, näyttää noin suunnilleen asialliselta. Kuvassa näkyy myös M8 mutterit, joiden avulla koko komeuden voi joko kallistaa tai asettaa suoraan riippuen käytettävästä sylinteristä ja muusta materiaalista.
Rautaosat saivat kevyen hionnan ja halvinta mattamustaa kilikolimaalia, näyttää noin suunnilleen asialliselta. Kuvassa näkyy myös M8 mutterit, joiden avulla koko komeuden voi joko kallistaa tai asettaa suoraan riippuen käytettävästä sylinteristä ja muusta materiaalista.
 Aikaisemmassa kuvassa näkyvät rullat vaihtuivat vielä koeajon jälkeen yhtenäiseen putkeen. Jos (kun) käytössä ei ole aivan tasaista sylinteriä niin sylinteri tahtoo vaeltaa rullien päältä sivuun. Viemäriputki, 3D-tulostetut sovitteet päihin ja putken päälle pari pätkää fillarin sisäkumia osoittautui ainakin toistaiseksi parhaimmaksi valinnaksi.
Aikaisemmassa kuvassa näkyvät rullat vaihtuivat vielä koeajon jälkeen yhtenäiseen putkeen. Jos (kun) käytössä ei ole aivan tasaista sylinteriä niin sylinteri tahtoo vaeltaa rullien päältä sivuun. Viemäriputki, 3D-tulostetut sovitteet päihin ja putken päälle pari pätkää fillarin sisäkumia osoittautui ainakin toistaiseksi parhaimmaksi valinnaksi.
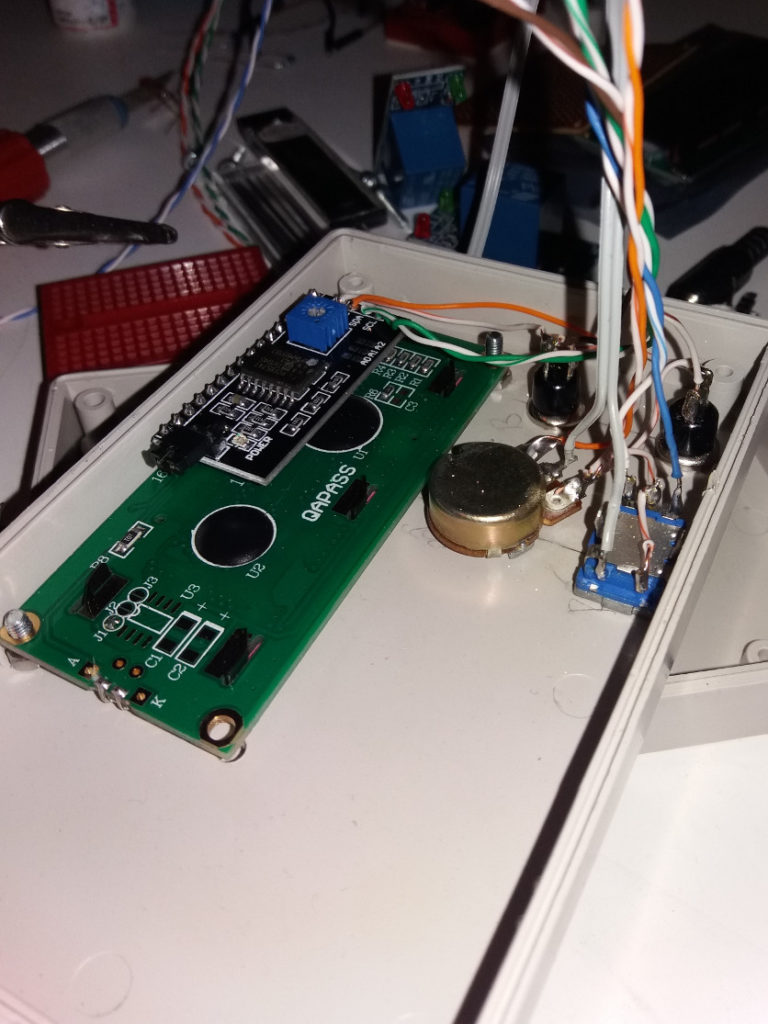 Mekaanisen askartelun jälkeen siirrytäänkin sitten elektroniselle puolelle. Nettiä penkomalla kuulamyllyn optimaalinen pyörimisnopeus on jossain 40-70RPM, riippuen sylinterin ja kuulien koosta. Porakoneen moottori vaihteistoineen antaa maksimissaan 800RPM. Jonkinlainen säätö siis mitä ilmeisimmin on tarpeen. Kuten kuvasta näkyy, niin hallintalaitteiden puolella on rotary encoder (mitähän tuo lie on suomeksi), 1602 LCD näyttö I2C-ohjaimella, potikka ja pari painonappia.
Mekaanisen askartelun jälkeen siirrytäänkin sitten elektroniselle puolelle. Nettiä penkomalla kuulamyllyn optimaalinen pyörimisnopeus on jossain 40-70RPM, riippuen sylinterin ja kuulien koosta. Porakoneen moottori vaihteistoineen antaa maksimissaan 800RPM. Jonkinlainen säätö siis mitä ilmeisimmin on tarpeen. Kuten kuvasta näkyy, niin hallintalaitteiden puolella on rotary encoder (mitähän tuo lie on suomeksi), 1602 LCD näyttö I2C-ohjaimella, potikka ja pari painonappia.
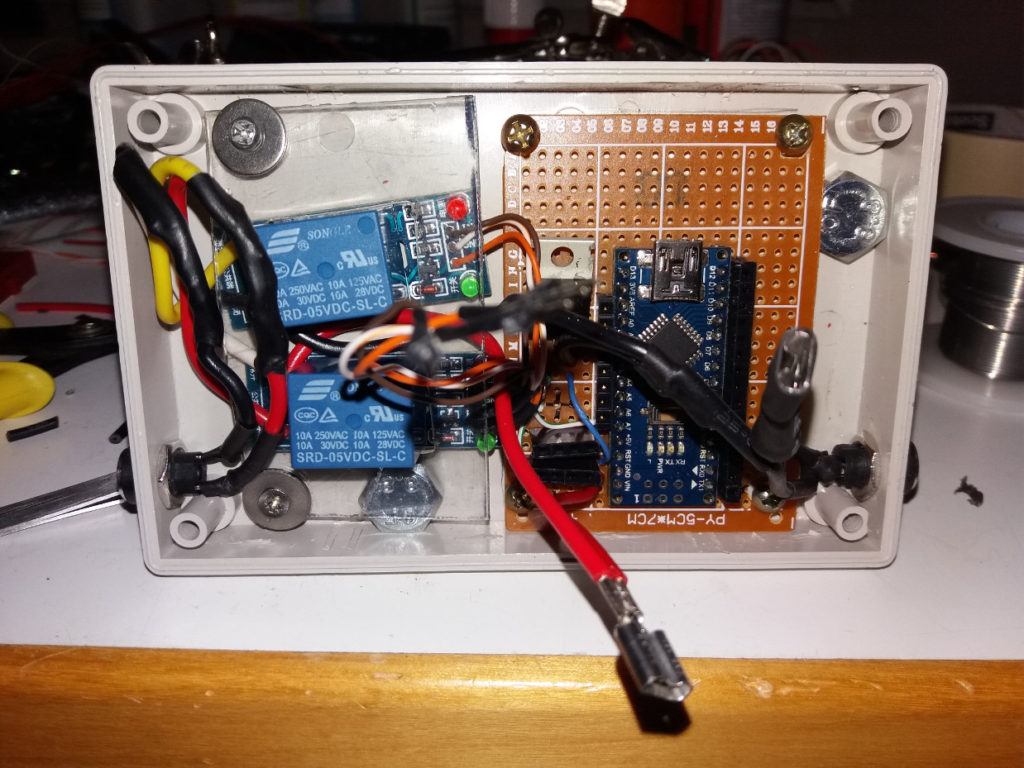 Aivopuolelta löytyy sitten arduino, logiikkatasolla ohjattava mosfet (IRFZ44N), pari relemodulia, iso diodi, muutama konkka ja pieni induktori. Releillä käännetään moottorin pyörimissuunta, iso diodi (1000V 10A) suojaa muuta elektroniikkaa jos (kun) moottori toimii generaattorina, mosfetillä tehdään PWM-ohjaus ja loput komponentit tasoittavat 7.5A kuorman aiheuttamia piikkejä.
Aivopuolelta löytyy sitten arduino, logiikkatasolla ohjattava mosfet (IRFZ44N), pari relemodulia, iso diodi, muutama konkka ja pieni induktori. Releillä käännetään moottorin pyörimissuunta, iso diodi (1000V 10A) suojaa muuta elektroniikkaa jos (kun) moottori toimii generaattorina, mosfetillä tehdään PWM-ohjaus ja loput komponentit tasoittavat 7.5A kuorman aiheuttamia piikkejä.
Kaikkea tätä harjoitellessa taikasavu karkasi kahdesta arduinosta ja vaikka kuinka sähköfysiikka on aina jollain tasolla kiinnostanut niin vieläkään en ole aivan varma mitä loppupelissä tapahtui. Puoliksi sivistynyt arvaus on, että moottorin käämit itsessään toimivat induktorina ja nappasivat PWM-pulssin jännitevaihtelua vastakarvaan ja arduino ei luonnollisesti tykkää kovin korkeista jännitteistä datalinjoissa. Oppia ikä kaikki, onneksi arduinokloonit eivät ebayssä montaa lanttia maksa.
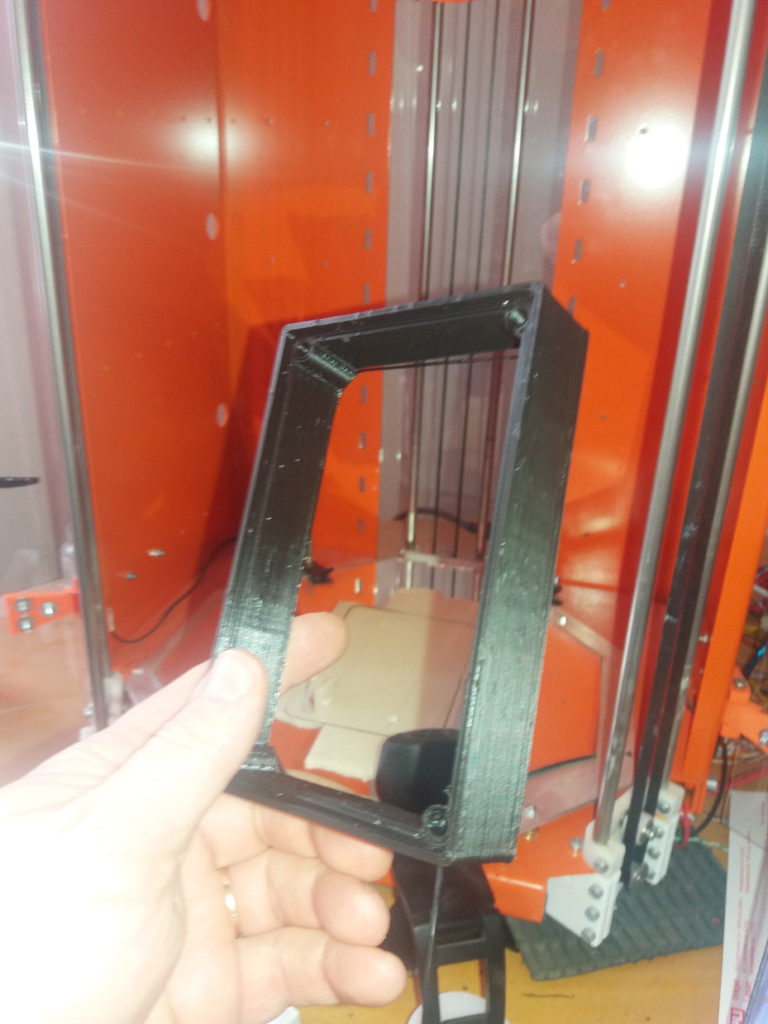 Seuraava ongelma tuli sitten saada kaikki komponentit mahtumaan nurkissa olleeseen koteloon. Loppupelissä jouduin nöyrtymään ja toteamaan, että etukäteissuunnittelusta ja sovittelusta huolimatta valmis kotelo jäi liian matalaksi.
Seuraava ongelma tuli sitten saada kaikki komponentit mahtumaan nurkissa olleeseen koteloon. Loppupelissä jouduin nöyrtymään ja toteamaan, että etukäteissuunnittelusta ja sovittelusta huolimatta valmis kotelo jäi liian matalaksi.
 Onneksi talosta löytyy 3D-tulostin niin ongelman sai varsin nätisti ratkaistua. Pieni korokepala oli nopea piirtää FreeCADilla eikä tulosteessakaan kovin montaa hetkeä mennyt.
Onneksi talosta löytyy 3D-tulostin niin ongelman sai varsin nätisti ratkaistua. Pieni korokepala oli nopea piirtää FreeCADilla eikä tulosteessakaan kovin montaa hetkeä mennyt.
Lopuksi koko komeus pakettiin ja koeajolle.
Arduinosoftasta löytyy toiminnot automaattiseen suunnanvaihtoon, nopeuden säätöön ja ajastettuun ajoon. Jos nämä kiinnostavat enemmän, niin koko komeus löytyy OpenSievi GitHubista ja jos jotain kysymyksiä kytkennästä tai softasta tulee, niin allekirjoittaneen saa kiinni vaikka tuosta alapuolelta.
Muutoin on nyt sitten pitänyt senverran kiirettä, ettei mylly ole päässyt koeajoa kummemmin tositoimiin, mutta kunhan sen aika koittaa niin kirjoittelen kokemuksia tännekin.
